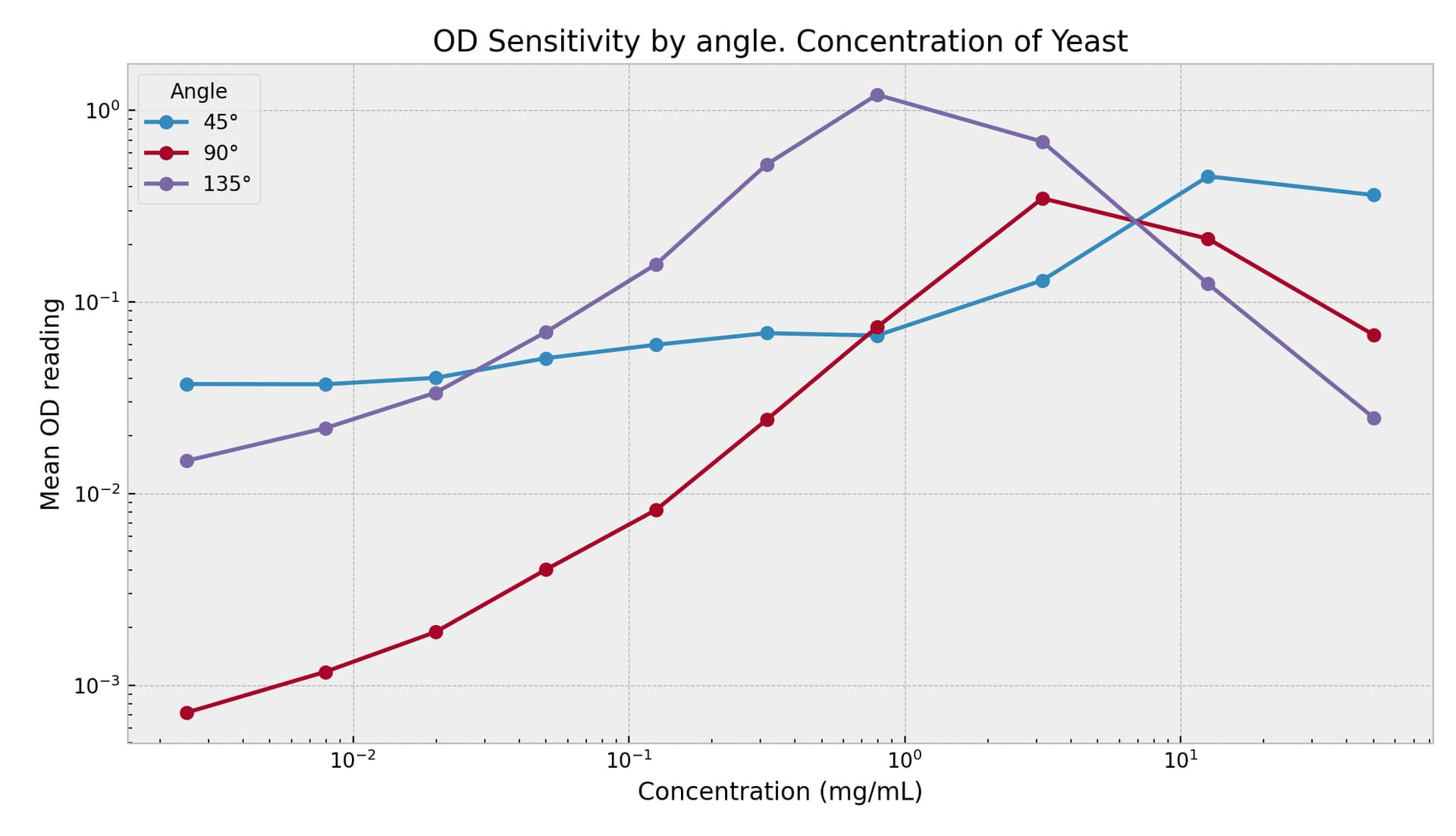
So the approach we take in the fusion is using the invertibility of the triplet to map to a concentration. To simplify first: if we had a single signal, for example the 90deg, then there exists a un-invertible problem: if you see 10^{-1} OD reading, then is that [10^{0}] or [10^{1.5}]? Both are possible. If we double the sensors, then we have a pair of sensors that may more often uniquely map to the single concentration. With three sensors, we get even more invertibility of the triplet.
The above implies that either positive or negative slops provide information since the sensor is changing with the density changing. Note then that a flat curve provides nil information. So 45deg in the low density regime isn’t very useful.
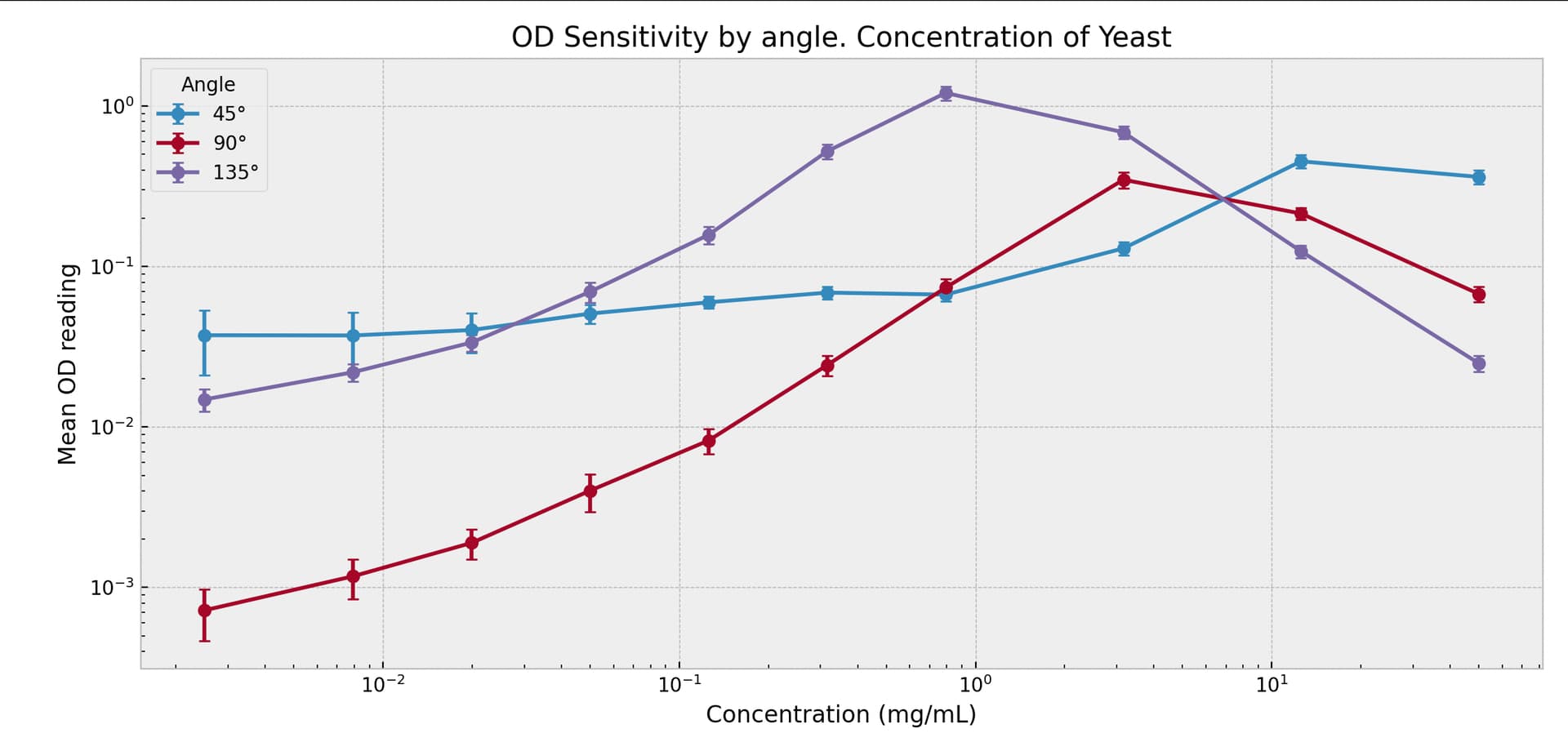
Another factor in the invertibility problem is noise. A positive slope, but very noisy sensor, can’t provide much information since we can’t rely on where the signal actually is. In practice, we see that sensor noise decreases with increasing density.
Here’s a chart with some error bars:
So to produce an od-fusion, we have, for each angle:
- an estimated curve
- a variance estimate around that curve
and together this produces a statistical model of the following: for a given density, what is the distribution of the triplet of signals?
We want to opposite though: given an observed triplet of signals, what is the density? We can perform a maximum-likelihood on this statistical model to estimate the density. If a region of the curve is flat, or has high variance, it doesn’t contribute much to the likelihood, and gets downweighted naturally. Ex: in the low density regime, our model probably doesn’t use 45 for inference, and probably not 90 much as well.
The nice thing about this approach is that we don’t need to manually pick and choose which sensor to use in which regime. The model is flexible enough to do that for us.
If you have it handy, it would be interesting to look at the combined fusion result for this plot.
So this wouldn’t be interesting! It would be a straight line between density and od-fusion! In a simulation, I would sweep over the density => produces the triplet => goes into the model to produce the od-fusion => naturally gives the maximum-likelihood equal to the density.